

The M-JPEG-based encoder that was introduced by G. Tzagkarakis et al. [7] consists of several modules that handle different operations of the video encoding process. We investigated more effective optimization approaches that minimize the execution time of the CS measurement acquisition process. In specific, we introduce a faster multicore implementation and also a GPU porting of the CS module that outperforms all optimization techniques that we have tried so far. In order to demonstrate the performance of the different approaches, we conducted three experiments: Execution Time vs Frame size, Execution time vs Block Size and Execution Time vs Sampling Ratio. |
|||||||||||||||||||
|
|
||||||||||||||||||
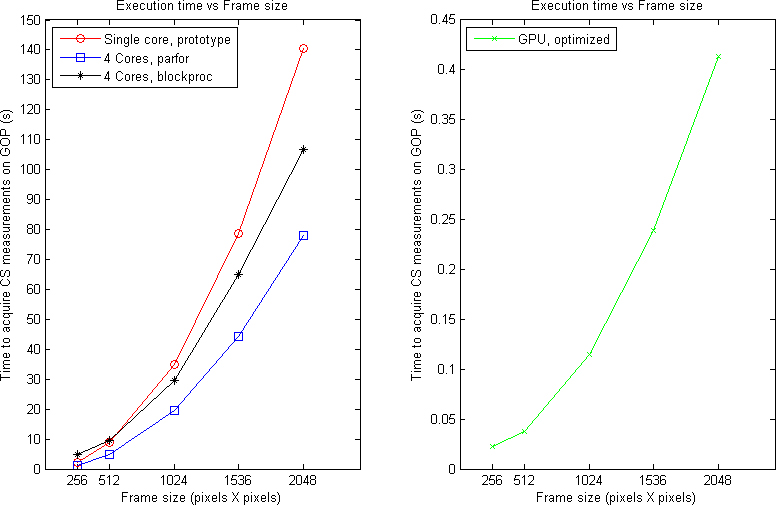
Figure 1: Execution Time vs Frame Size |

Figure 1: Execution Time vs Frame Size
|
||||||||||||||||||
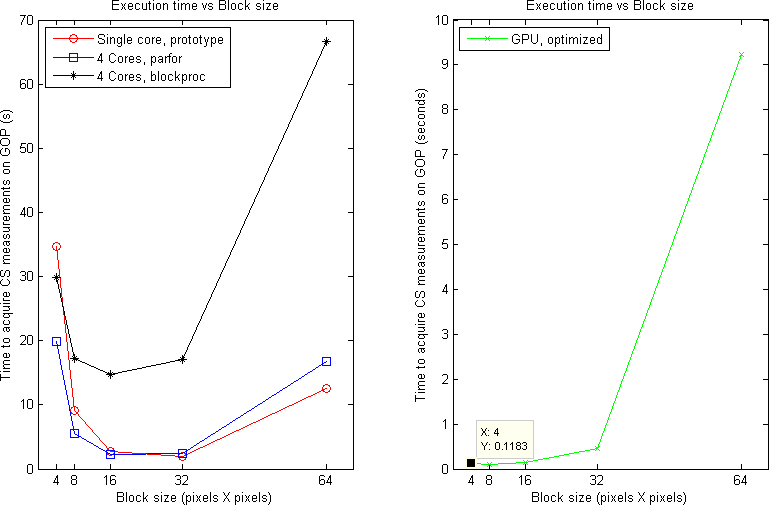
Figure 3: Execution Time vs Block Size |
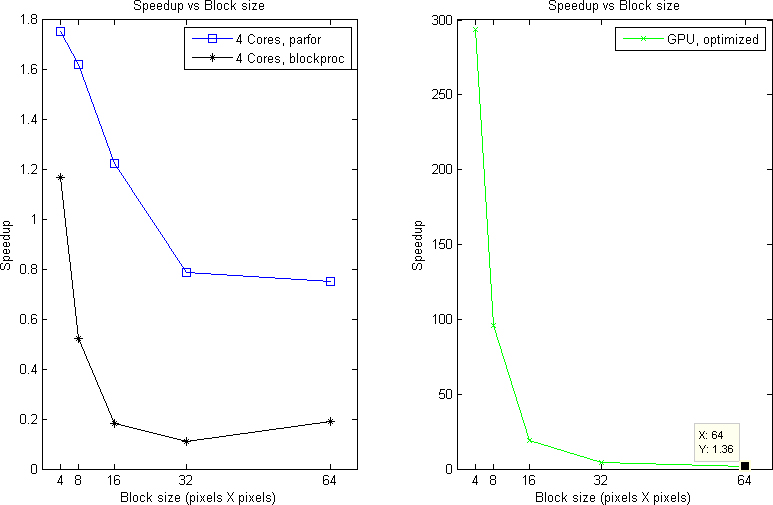
Figure 4: Speedup vs CS Block Size |
||||||||||||||||||
ORION members involved: Kostas Lekkas, George Tzagkarakis. |
|||||||||||||||||||
Compressed Sensing for Remote Imaging in Aerial and Terrestrial Surveillance
ACHIEVEMENTS